I write this in celebration of my sister, Kodua Michelle Bennett Galieti who passed away early this morning here at her farm in Elkton, Oregon.
I write this only in celebration and tribute, not as a plea for sympathy.
Last week, sitting next to her while she napped, I just stared at her hands. And then I took a photograph.
We come from a long line of makers, craftspeople, and artists. Hands hold stories and my sister’s had many chapters reflecting a life that seemed most days more fantasy than non-fiction.
As a teen and into her early twenties she would use them to guide her horse into an almost parallel lean to the ground rounding barrels at top speed in many a rodeo. She used them to hold shovels to muck out stables at a local thoroughbred race horse farm as her after school job. My sisters and I never shied away from shovels, rakes, hoes, or posthole diggers.
Her hands waved in parades and rodeo processions the year she was crowned Miss Rodeo Louisiana.
She and her husband have four horses here at the farm. The newest, a wild mustang (recently, mostly tamed) a lifelong dream of hers to own one, fulfilled, a gift from her husband a few months ago. She and her husband Jeff, rode their horses up many mountains in the most beautiful of places, sleeping under the stars.
In her late twenties she became a massage therapist in Los Angeles and created her own signature line of oils and lotions because she didn’t like what was in the marketplace. While I was pregnant with one of my sons, I complained that I wished I could get a massage, so she invented and patented a pregnancy massage table. She became certified in labor and delivery and an instructor certifying massage therapists in pregnancy massage. Her therapist hands also helped Alzheimer's patients, the elderly suffering from phlebitis, and those in chronic pain from accidents. She went to Ghana, Africa and Papua, New Guinea as part of medical mission trips. She massaged the necks, shoulders and feet of people who ached from walking miles for water with buckets and urns on their heads. Her hands healed people.
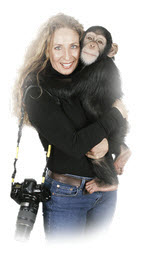
She completely and utterly delighted any person lucky enough to know her during her years as a foster parent to dozens (yes dozens) of baby chimpanzees and orangutans because we got to hold them and play with them. She placed large eyebolts to hold a giant rope across the length of her Echo Park bedroom so any primate in her care could climb. Her niece and nephews loved being able to hang out with baby primates. Such fun. The last chimp she cared for was also her namesake, Baby Kodua. Many of them were retired and they now live in Florida at the Center for Great Apes. I have such vivid memories of my sister in full grin with a baby chimpanzee in her arms.
Both of her thumbs were green.
She didn’t just garden. She GARDENED. To match her personality, her garden vegetables were gigantic. She would send us photos of her wheelbarrow filled to the brim with her harvest of the day. Those hands of hers were happiest digging in the dirt. She would flip through the pages of Baker Creek Seed Catalogue buying up every packet of Heirloom seeds that caught her fancy. So many seeds. She planted them with the childlike anticipation of Christmas. And because she seemed to have the same tomato vines producing year round, she canned her own salsas and spaghetti sauces.
She perfected the most delicious of “fall off the bone” smoked ribs. She made her special rub and proceeded to guard them on “her” grill for hours. She made many delicious meals. Always heavy handed on the cayenne pepper. She loved spicy. When visiting family in Louisiana and out at a restaurant eating boiled crawfish she always asked the waiter to bring her more cayenne. Her palate would make a Cajun cry.
Several years ago she decided she wanted to be a bee keeper. She spent her life making statements of wanting to try something new and then she would just do it. I admired that about her. No second guessing, no overthinking, she would do things she wanted to do, go places she wanted to go. So, she joined the Los Angeles County Beekeepers Association and then started one hive after another of bees. She got an extractor, a real stainless large extractor and bottled gallons of honey. And, she then gave it away to every person in her day to day life. Hundreds of bottles of delicious raw honey, gifting it and gifting it. She trained me to help her when I visited. Once she convinced me to help her move a feral hive high in a treetop into a bee box to be relocated. Though she convinced me it would be easy, it was not. Prior to us relocating it she tried to convince her husband that he could move it. His stings ended with him at the Emergency Room. But through some insane branch breaking millions of bees flying around and several hours later, we did it. It wasn’t pretty but we did it. Her husband Jeff’s, bee stings were the battle wounds of the day.
All along the way she was a photographer. At first it was just documenting her time on international mission trips. Cuba. Mexico. Norway. Africa. New Guinea. Switzerland. Then she documented her life with the chimps. She always photographed her loved ones and some of our favorite photographs are of my sons, my nephew and my niece. Those photos are the ones in which she captured their truest selves. She photographed her husband and their trips up the mountain on their draft horses. He took her once as a surprise to a remote area to witness a herd of wild mustangs. One of the best shots she took that trip is framed and hangs above their bed. She documented and then she would make photo albums for us to mark the occasions. Nice albums, forever albums.
And then, a few years ago she went macro. Her bees became her most favorite subject. She delighted in capturing brilliant orange pollen sacs and even mites on her bees’ butts. She documented the California Almond Odyssey in which millions of bees are shipped in to orchards for pollination it was shared in Bee Culture magazine. She was hired by Israel’s Ministry of Agriculture to photograph their bees for research purposes. She produced for several years a bee calendar sold at bookstores and online. Her bee photographs can still be seen at the L.A. County Fair each year.
And then, almost five years ago her hands started closing in on themselves and after many tests and appointments their closure came to be the early symptom of ovarian cancer. Her hands wouldn’t be able take photos for almost a year. She went through chemo, she had physical therapy to work them. Her hands were the signal and gave us more years than we might have had otherwise. I am grateful for them, for their clues to a diagnosis. I am grateful they were attached our adventure seeking, hardworking, generous hearted, gifted, beautiful sister with a laugh that filled a room, with an attitude and fortitude that kept her with us longer than any other person with the same issues. A woman who was still smitten with her husband. Who showed her love for us with adventures and her license plate frame of “the fun has arrived”.
I am grateful for the example of living she has left for us as we mourn and celebrate her all in the same breath.
Live. Do. Try. Love.